
റോഡ്റാഗൺ കാർ പൊസിഷനിംഗ് ആന്റി-തെഫ്റ്റ് സിസ്റ്റം ജിഎസ്എം മൊഡ്യൂൾ, ജിപിഎസ് പൊസിഷനിംഗ് മൊഡ്യൂൾ, സെൻസർ മൊഡ്യൂൾ എന്നിവയുമായി സംയോജിച്ച് 51 സീരീസ് സിംഗിൾ-ചിപ്പ് എസ്ടിഎം 32 കൺട്രോൾ കോർ ആയി ഉപയോഗിക്കുന്നു.
പ്രോഗ്രാമിംഗ് ഡിസൈൻ സ്വതന്ത്ര കണ്ടെത്തൽ, പൊസിഷനിംഗ്, ആന്റി തെഫ്റ്റ് എന്നിവയുടെ പ്രവർത്തനം മനസ്സിലാക്കുന്നു. സെൻസർ മൊഡ്യൂൾ സാധാരണയായി അടച്ച വൈബ്രേഷൻ സെൻസർ സ്വീകരിക്കുന്നു , ഇത് വൈബ്രേഷനെ ഫലപ്രദമായി നിയന്ത്രിക്കാൻ കഴിയും
ചലനാത്മക സിഗ്നൽ ഒരു വൈദ്യുത സിഗ്നലായി പരിവർത്തനം ചെയ്യപ്പെടുന്നു; ഒരു പൊസിഷനിംഗ് മൊഡ്യൂളായി SIM908 ചിപ്പിന് വാഹനത്തിന്റെ സ്ഥാനവും വേഗതയും ഫലപ്രദമായി നിർണ്ണയിക്കാനും അടുത്ത പ്രവർത്തനത്തിനായി ഡാറ്റ സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടറിലേക്ക് അയയ്ക്കാനും കഴിയും.
പ്രവർത്തനം; സീരിയൽ പോർട്ടിലൂടെയും സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടറിലൂടെയും ഡാറ്റ കൈമാറാനും ഉടമയ്ക്ക് സ്റ്റാറ്റസ് വിവരങ്ങൾ അയയ്ക്കാനും ഉടമയെ സ്വീകരിക്കാനും കഴിയുന്ന സീമെൻസ് ടിസി 35i ചിപ്പ് ജിഎസ്എം മൊഡ്യൂൾ സ്വീകരിക്കുന്നു.
നിയന്ത്രണ കമാൻഡുകൾ. യഥാർത്ഥ പരിശോധനയ്ക്ക് ശേഷം, കാർ പൊസിഷനിംഗ് ആന്റി തെഫ്റ്റ് സിസ്റ്റം വിശ്വസനീയവും പ്രായോഗികവും കുറഞ്ഞ ചെലവും ഇൻസ്റ്റാൾ ചെയ്യാൻ എളുപ്പവുമാണ്, കൂടാതെ കാർ ഉടമകൾക്ക് സുരക്ഷിതവും വിശ്വസനീയവുമായ കാർ പരിരക്ഷ നൽകുന്നു.
വാഹന സ്വത്തിന്റെ സുരക്ഷ തെളിയിക്കുക.
അടുത്ത കാലത്തായി, കാറുകൾക്ക് മന damage പൂർവ്വം നാശനഷ്ടം, അനധികൃത മോഷണം തുടങ്ങിയ ട്രാഫിക് അപകടങ്ങൾ വർദ്ധിച്ചു. റോഡിൽ ഇൻസ്റ്റാൾ ചെയ്തിട്ടുള്ള വീഡിയോ നിരീക്ഷണം നഷ്ടപ്പെട്ട കാർ വീണ്ടെടുക്കാൻ സഹായിക്കുമെങ്കിലും, ഇതിന് ധാരാളം മനുഷ്യശക്തിയും ഭ material തിക വിഭവങ്ങളും ആവശ്യമാണ്. വഴി കാർ പൊസിഷനിംഗ് ആന്റി തെഫ്റ്റ് സിസ്റ്റം , ഉടമ ഫലപ്രദമായി കാർ വിദൂര നിയന്ത്രണം ഗ്രഹിക്കാൻ കഴിയും. കാർ മന intention പൂർവ്വം കേടുവരുത്തുകയോ മോഷ്ടിക്കപ്പെടുകയോ ചെയ്യുമ്പോൾ, കാർ ഉടമസ്ഥന് പൊസിഷനിംഗ് ആന്റി-തെഫ്റ്റ് സിസ്റ്റം ഉപയോഗിച്ച് ഇന്ധനത്തിൽ നിന്നും വൈദ്യുതിയിൽ നിന്നും കാറിനെ സംരക്ഷിക്കാൻ കഴിയും.
ഓട്ടോമൊബൈൽ പ്രകടനം നിരന്തരമായ ഒപ്റ്റിമൈസേഷനും മെച്ചപ്പെടുത്തലും ഉപയോഗിച്ച്, വാഹന നിർമ്മാതാക്കൾ അടിയന്തിരമായി പരിഹരിക്കേണ്ട പ്രശ്നങ്ങളിലൊന്നാണ് വാഹനങ്ങളുടെ സുരക്ഷ. ആന്റി-മോഷണത്തിന്റെ തോത് ഫലപ്രദമായി മെച്ചപ്പെടുത്തുന്നതിനായി, കാർ മോഷണ വിരുദ്ധ സംവിധാനങ്ങൾ ഒന്നിനുപുറകെ ഒന്നായി ഉയർന്നുവരുന്നു. ഏറ്റവും ജനപ്രിയമായ ജിഎസ്എം നെറ്റ്വർക്ക് ഉപയോഗിച്ച്, ഹാർഡ്വെയർ, സോഫ്റ്റ്വെയർ, കമ്മ്യൂണിക്കേഷൻ നെറ്റ്വർക്കുകൾ എന്നിവ സംയോജിപ്പിച്ച് നെറ്റ്വർക്ക് വഴി കാറുകളുടെ വിദൂര പൊസിഷനിംഗും ആന്റി-തെഫ്റ്റ് മോണിറ്ററിംഗും . കൂടാതെ, മൊബൈൽ എപിപിയുടെയും ഹാർഡ്വെയർ പ്രകടനത്തിന്റെയും വളർച്ച കാറുകളുടെ നവീകരണത്തെ പ്രോത്സാഹിപ്പിച്ചു. കാർ ഉടമകളെ പൂർത്തിയാക്കാൻ ഈ ലേഖനം ഹാർഡ്വെയർ, സോഫ്റ്റ്വെയർ, കമ്മ്യൂണിക്കേഷൻ നെറ്റ്വർക്കുകൾ എന്നിവ സംയോജിപ്പിക്കുന്നു.
Remote location anti-theft monitoring. കൂടാതെ, മൊബൈൽ എപിപിയും ഹാർഡ്
പാർട്സ് പ്രകടനത്തിന്റെ വളർച്ചയും കാറുകളുടെ നവീകരണത്തെ പ്രോത്സാഹിപ്പിച്ചു.
മൊത്തത്തിലുള്ള ഡിസൈൻ തത്വം
റോഡ്റാഗൺ പരമ്പരാഗത കാർ ആന്റി-തെഫ്റ്റ് സിസ്റ്റം സംയോജിപ്പിച്ച് നിലവിലുള്ള യഥാർത്ഥ ആവശ്യങ്ങൾ അടിസ്ഥാനമാക്കി ഒരു പുതിയ കാർ പൊസിഷനിംഗ് ആന്റി തെഫ്റ്റ് സിസ്റ്റം രൂപകൽപ്പന ചെയ്തു. വാഹന നില വിവരങ്ങൾ ശേഖരിക്കുന്നതിന് വൈബ്രേഷൻ സെൻസറുകൾ ഉപയോഗിക്കുക, കാറിന്റെ സ്ഥാനവും വേഗതയും നിർണ്ണയിക്കാൻ ജിപിഎസ് പൊസിഷനിംഗ് സിസ്റ്റം ഉപയോഗിക്കുക, വിവര പ്രോസസ്സിംഗിനായി സ്റ്റാറ്റസ് വിവരങ്ങൾ മൈക്രോകൺട്രോളറിലേക്ക് അയയ്ക്കുക, ഒടുവിൽ ജിഎസ്എം നെറ്റ്വർക്ക് ഉപയോഗിച്ച് പ്രക്ഷേപണം ചെയ്യുക എന്നതാണ് നിർദ്ദിഷ്ട പ്രവർത്തന തത്വം. ഫലങ്ങൾ ഉടമയുടെ മൊബൈൽ ഫോണിലേക്ക് പ്രോസസ്സ് ചെയ്യുന്നു. സാഹചര്യം സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടറിലേക്ക് നിയന്ത്രണ കമാൻഡ് അയയ്ക്കുകയും ഒടുവിൽ cutting off the oil and power of the car
പ്രധാന സാങ്കേതിക ആമുഖം
2.1 ജിഎസ്എം ആശയവിനിമയ സാങ്കേതികവിദ്യ
ഏറ്റവും കൂടുതൽ ഉപയോഗിക്കുന്ന മൊബൈൽ കമ്മ്യൂണിക്കേഷൻ സ്റ്റാൻഡേർഡാണ് ജിഎസ്എം (ഗ്ലോബൽ സിസ്റ്റം ഫോർ മൊബൈൽ കമ്മ്യൂണിക്കേഷൻസ്), ഇത് എയർ ഇന്റർഫേസിന്റെ ടൈം ഡിവിഷൻ മൾട്ടിപ്പിൾ ആക്സസ് ടെക്നോളജി ഉപയോഗിക്കുന്നു.
ജനറൽ പാക്കറ്റ് റേഡിയോ സേവനത്തിന്റെ ചുരുക്കമാണ് ജിപിആർഎസ്, ഘട്ടം 2 + ഘട്ടത്തിൽ ജിഎസ്എം നൽകുന്ന ഒരു പാക്കറ്റ് ഡാറ്റ സേവനമാണിത്. ഉയർന്ന വേഗതയുള്ളതും കുറഞ്ഞ വേഗതയുള്ളതുമായ ഡാറ്റയും സിഗ്നലിംഗും ഫലപ്രദമായി കൈമാറുന്നതിന് പാക്കറ്റ് ട്രാൻസ്മിഷൻ മോഡ് അടിസ്ഥാനമാക്കിയുള്ള വയർലെസ് ഐപി സാങ്കേതികവിദ്യ ഇത് ഉപയോഗിക്കുന്നു. ജിഎസ്എം നെറ്റ്വർക്കിന്റെ , ജിഎസ്എമ്മിന്റെ അപ്ഡേറ്റ് ചെയ്ത വികസനമാണ് ജിപിആർഎസ്. പ്രധാനമായും ബേസ് സ്റ്റേഷൻ സബ്സിസ്റ്റം, മൊബൈൽ നെറ്റ്വർക്ക് സബ്സിസ്റ്റം, മൊബൈൽ സ്റ്റേഷൻ, ഓപ്പറേഷൻ സപ്പോർട്ട് സബ്സിസ്റ്റം എന്നിവ ഉൾക്കൊള്ളുന്ന ട്രാൻസ്മിഷൻ മാധ്യമമായി ജിപിആർഎസ് സാങ്കേതികവിദ്യ വിശാലമായ വയർലെസ് നെറ്റ്വർക്ക് ഉപയോഗിക്കുന്നു.
ഘടന. അവയിൽ, ഓപ്പറേഷൻ സപ്പോർട്ട് സബ്സിസ്റ്റത്തിന് മൊബൈൽ ഉപയോക്തൃ മാനേജുമെന്റ്, മൊബൈൽ ഉപകരണ മാനേജുമെന്റ്, സിസ്റ്റം പ്രവർത്തനവും പരിപാലനവും പൂർത്തിയാക്കേണ്ടതുണ്ട്. ഈ പ്ലാറ്റ്ഫോമിന് ഉപയോക്താക്കളുമായി നേരിട്ടുള്ളതും തടസ്സമില്ലാത്തതുമായ ഇടപെടൽ മനസിലാക്കാൻ കഴിയും, കൂടാതെ ഇതിന് അതിന്റേതായ മാനേജുമെന്റ് സിസ്റ്റവും എളുപ്പത്തിൽ ഉപയോഗിക്കാനായി അധിക സോഫ്റ്റ്വെയർ ഇന്റർഫേസുകളും ഉണ്ട്.
പ്രധാന സവിശേഷതകൾ: ജിപിആർഎസിന് വയർലെസ് ഉറവിടങ്ങൾ ചലനാത്മകമായി കൈവരിക്കാൻ കഴിയും, അതായത്, ഒന്നിലധികം ഉപയോക്താക്കൾക്ക് ഒരു വയർലെസ് ചാനൽ പങ്കിടാൻ കഴിയും, കൂടാതെ ഒരു ഉപയോക്താവിന് ഒരേ സമയം ഒന്നിലധികം വയർലെസ് ചാനലുകൾ നേടാൻ കഴിയും, ഇത് ചാനൽ ഉപയോഗത്തെയും ഡാറ്റാ നിരക്കിനെയും വളരെയധികം മെച്ചപ്പെടുത്തുന്നു; ഡൈനാമിക് ലിങ്ക് അഡാപ്റ്റേഷൻ നടപ്പിലാക്കി, ഉപയോക്താക്കൾ എല്ലായ്പ്പോഴും ഓൺലൈൻ കണക്ഷൻ അവസ്ഥയിൽ, ആക്സസ് വേഗത വേഗത്തിലാണ്; ഉപയോക്താക്കൾക്ക് 4 തരം QoS സേവനങ്ങൾ നൽകുക, കൂടാതെ ഉപയോക്തൃ QoS ന്റെ ക്രമീകരണം ചർച്ചചെയ്യാം; X.25 പ്രോട്ടോക്കോൾ, IP പ്രോട്ടോക്കോൾ എന്നിവ പിന്തുണയ്ക്കുക; താരിഫ് കൂടുതൽ ന്യായയുക്തമാക്കാൻ ഡാറ്റ ഫ്ലോ അക്ക ing ണ്ടിംഗ് ഉപയോഗിക്കുക.
അപകടത്തിന് ശേഷം വൈബ്രേഷൻ ഉണ്ടാക്കുന്നതിനായി ഈ രൂപകൽപ്പന കാറിൽ പ്രയോഗിക്കുന്നു, സിസ്റ്റം സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടർ ജിഎസ്എം മൊഡ്യൂളിനെ വിളിക്കുന്നു, തുടർന്ന് അടുത്ത നിയന്ത്രണം സൃഷ്ടിക്കുന്നതിന് ഒരു നിയന്ത്രണ കമാൻഡ് അയയ്ക്കണോ എന്ന് കാർ ഉടമയെ അറിയിക്കുന്നതിന് സ്റ്റാറ്റസ് വിവരങ്ങൾ അയയ്ക്കുന്നു.
2.2 ജിപിഎസ് പൊസിഷനിംഗ് സാങ്കേതികവിദ്യ
യുഎസ് സൈന്യം വികസിപ്പിക്കുകയും ജനപ്രിയമാക്കുകയും ചെയ്ത ഒരു ആഗോള പൊസിഷനിംഗ് സിസ്റ്റമാണ് ജിപിഎസ് (ഗ്ലോബൽ പൊസിഷനിംഗ് സിസ്റ്റം). കര, കടൽ, വായു എന്നീ മൂന്ന് പ്രധാന മേഖലകൾക്ക് തത്സമയ, എല്ലാ കാലാവസ്ഥ, ആഗോള നാവിഗേഷൻ സേവനങ്ങൾ നൽകാനും രഹസ്യാന്വേഷണ ശേഖരണം, ന്യൂക്ലിയർ സ്ഫോടന നിരീക്ഷണം, അടിയന്തിര ആശയവിനിമയം എന്നിവ പോലുള്ള സൈനിക ആവശ്യങ്ങൾക്കായി ഇത് ഉപയോഗിക്കാനും കഴിയും.
ജിപിഎസ് സംവിധാനം പ്രധാനമായും ഒരു ബഹിരാകാശ നക്ഷത്രസമൂഹം, ഒരു ഗ്രൗണ്ട് മോണിറ്ററിംഗ് ഭാഗം, ഉപയോക്തൃ ഉപകരണ ഭാഗം എന്നിവ ഉൾക്കൊള്ളുന്നു:
(1) ബഹിരാകാശ നക്ഷത്രസമൂഹത്തിന്റെ ഭാഗം, അതായത് ജിആർഎസ് സാറ്റലൈറ്റ് പൊസിഷനിംഗ് നക്ഷത്രസമൂഹം 24 ഉപഗ്രഹങ്ങൾ ഉൾക്കൊള്ളുന്നു.
(2) ഗ്ര ground ണ്ട് മോണിറ്ററിംഗ് ഭാഗം, നിലത്ത് സാറ്റലൈറ്റ് സിഗ്നലുകൾ നിരീക്ഷിക്കുന്നതിനുള്ള ടെർമിനൽ ഉപകരണങ്ങൾ, 1 മാസ്റ്റർ കൺട്രോൾ സ്റ്റേഷൻ (മാസ്റ്റർ കൺട്രോൾ സ്റ്റേഷൻ, ഹ്രസ്വമായി എംസിഎസ്), 4 ഗ്ര ground ണ്ട് ആന്റിന സ്റ്റേഷനുകൾ (ഗ്ര round ണ്ട് ആന്റിന), 6 മോണിറ്ററിംഗ് സ്റ്റേഷനുകൾ (മോണിറ്റർ സ്റ്റേഷൻ) ) ഘടന.
(3) ഉപയോക്തൃ ഉപകരണ ഭാഗം, അതായത് ജിപിഎസ് റിസീവർ പ്രധാനമായും ജിപിഎസ് സാറ്റലൈറ്റ് സിഗ്നലുകൾ സ്വീകരിക്കുന്നതിനും കൈമാറ്റം ചെയ്ത വിവരങ്ങൾ ഉപയോഗിക്കുന്നതിനും ഉപയോക്താവിന്റെ ത്രിമാന സ്ഥാനവും സമയവും കണക്കാക്കാൻ ഉപയോഗിക്കുന്നു.
ജിപിഎസ് സാറ്റലൈറ്റ് പൊസിഷനിംഗ് സിസ്റ്റം ഉപയോഗിച്ച് സ്ഥാനനിർണ്ണയത്തിന് നിരവധി മാർഗങ്ങളുണ്ട്, അവയിൽ സാധാരണയായി ഉപയോഗിക്കുന്ന മൂന്ന് രീതികളുണ്ട്: ഘട്ടം പൊസിഷനിംഗ് രീതി, സ്യൂഡോ-റേഞ്ച് പൊസിഷനിംഗ് രീതി, ഡോപ്ലി പൊസിഷനിംഗ് രീതി. വിവിധ പൊസിഷനിംഗ് സിസ്റ്റങ്ങൾ വ്യത്യസ്ത പൊസിഷനിംഗ് രീതികൾ ഉപയോഗിക്കുന്നതിനാൽ, ഓരോന്നിനും അതിന്റേതായ ഗുണങ്ങളും ദോഷങ്ങളുമുണ്ട്. ജിപിഎസിന്റെ സവിശേഷതകൾ ഇവയാണ്: ആഗോളവും 24 മ. ജോലി, ഉയർന്ന പൊസിഷനിംഗ് കൃത്യത, ത്രിമാന കോർഡിനേറ്റുകൾ, ഒന്നിലധികം പ്രവർത്തനങ്ങൾ, വിശാലമായ ശ്രേണി, നല്ല ആന്റി-ഇടപെടൽ, രഹസ്യാത്മകത എന്നിവ നൽകാൻ കഴിയും. ആന്റി-തെഫ്റ്റ് സിസ്റ്റത്തിലെ ജിപിഎസിന്റെ പ്രാഥമിക ദ task ത്യം ഉപഗ്രഹങ്ങളിൽ നിന്ന് അയച്ച ഡാറ്റ സ്വീകരിക്കുക, റേഡിയോ വേവ് സിഗ്നലിന് വാഹനത്തിന്റെ കൃത്യമായ സ്ഥാനവും വേഗത്തിലുള്ള ഡാറ്റയും യഥാസമയം നേടാൻ കഴിയും, തുടർന്ന് അൽഗോരിതം കണക്കുകൂട്ടലിനായി സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടർ സ്വീകരിക്കുന്നു. .
ഹാർഡ്വെയർ, സോഫ്റ്റ്വെയർ സിസ്റ്റം ഡിസൈൻ

ഈ സിസ്റ്റത്തിന്റെ ഹാർഡ്വെയർ മൊഡ്യൂളുകളിൽ പവർ സപ്ലൈ മൊഡ്യൂൾ, മെയിൻ കൺട്രോളർ മൊഡ്യൂൾ, ജിഎസ്എം എന്നിവ ഉൾപ്പെടുന്നു
മൊഡ്യൂൾ, ജിപിഎസ് മൊഡ്യൂൾ, വൈബ്രേഷൻ സെൻസർ മൊഡ്യൂൾ, റിലേ കൺട്രോൾ മൊഡ്യൂൾ [11]. വൈദ്യുതി
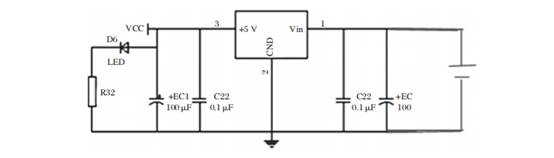
പവർ സോഴ്സ് മൊഡ്യൂൾ 12 വി ബാറ്ററിയിലൂടെ 5 വി ഡിസി സ്ഥിരതയുള്ള വൈദ്യുതി വിതരണമാക്കി മാറ്റുന്നു.
12 V വോൾട്ടേജ് ആവശ്യമായ വോൾട്ടേജായി പരിവർത്തനം ചെയ്യുന്നതിന് ത്രീ-ടെർമിനൽ ഇന്റഗ്രേറ്റഡ് വോൾട്ടേജ് റെഗുലേറ്റർ സർക്യൂട്ട് ഘടകങ്ങൾ ഉപയോഗിക്കുക.
ലെവൽ. പവർ മൊഡ്യൂൾ സർക്യൂട്ട് ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നു.
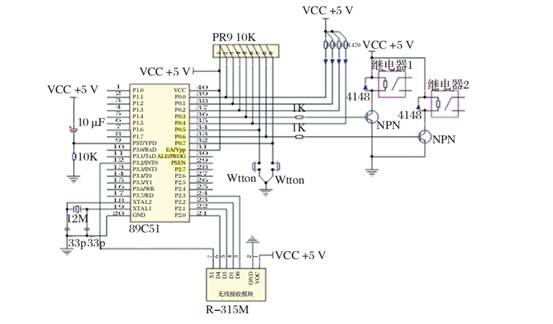
എസ്ഡബ്ല്യു -420 സാധാരണയായി അടച്ച വൈബ്രേഷൻ മൊഡ്യൂൾ, ജിപിഎസ് പൊസിഷനിംഗ് മൊഡ്യൂൾ, ജിഎസ്എം നെറ്റ്വർക്ക്, പവർ-ഓഫ് കൺട്രോൾ, പെരിഫറൽ സർക്യൂട്ടുകൾ എന്നിവയുമായി കണക്റ്റുചെയ്തിരിക്കുന്ന മുഴുവൻ സിസ്റ്റത്തിന്റെയും കാമ്പാണ് പ്രധാന കൺട്രോളർ മൊഡ്യൂൾ. പെരിഫറൽ സർക്യൂട്ട് പ്രധാനമായും ക്ലോക്ക്, റീസെറ്റ്, മറ്റ് സർക്യൂട്ടുകൾ എന്നിവ ഉൾക്കൊള്ളുന്നു. ഈ സിസ്റ്റം STM32F103 തരം സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടർ സ്വീകരിക്കുന്നു, അതിന്റേതായ ആർടിസി (റിയൽ ടൈം ക്ലോക്ക്) ഫംഗ്ഷനും പവർ-ഓൺ റീസെറ്റും. അവയിൽ, ടിസി 35i ന് ലഭിച്ച എടി നിയന്ത്രണ കമാൻഡ് സീരിയൽ പോർട്ട് 1 ൽ ടിഎക്സ്ഡി 1 അയയ്ക്കുന്നു. ടിസി 35i ആർഎക്സ്ഡി 1, ജിആർ -87 ന്റെ ഡാറ്റാ സ്വീകരണം നിയന്ത്രിക്കുന്നു
ജിപിഎസ് ഡാറ്റാ സ്ട്രീം സീരിയൽ പോർട്ട് 2 ന്റെ ടിഎക്സ്ഡി 2 സ്വീകരിക്കുന്നു. കൂടാതെ, പവർ-ഓഫ് കൺട്രോൾ സർക്യൂട്ട് നിയന്ത്രിക്കുന്നത് സീരിയൽ പോർട്ട് പി 1.1 ആണ്, ഒടുവിൽ വാഹനം ആരംഭിക്കുന്ന സർക്യൂട്ടിന്റെ തുറക്കലും അടയ്ക്കലും തിരിച്ചറിയുന്നു.
സിംഗിൾ-ചിപ്പ് കമ്പ്യൂട്ടറുമായി ഒരു സീരിയൽ പോർട്ട് വഴി ആശയവിനിമയം നടത്താൻ ജിഎസ്എം മൊഡ്യൂൾ സീമെൻസിന്റെ ഡ്യുവൽ-ഫ്രീക്വൻസി ഇൻഡസ്ട്രിയൽ-ഗ്രേഡ് മൊഡ്യൂൾ ടിസി 35i ഉപയോഗിക്കുന്നു. ഈ സർക്യൂട്ട് പ്രധാന കൺട്രോളറിന്റെ നിയന്ത്രണത്തിലുള്ള ഉടമയുടെ മൊബൈൽ ഫോണിലേക്ക് വിവരങ്ങൾ അയയ്ക്കുകയും അതേ സമയം ഉടമയുടെ പ്രസക്തമായ നിയന്ത്രണ കമാൻഡുകൾ ഏറ്റെടുക്കുകയും ചെയ്യുന്നു.
ജിപിഎസ് പൊസിഷനിംഗ് മൊഡ്യൂൾ സിം 908 ചിപ്പ് തിരഞ്ഞെടുക്കുന്നു, പവർ സപ്ലൈ ഓപ്പറേറ്റിംഗ് വോൾട്ടേജ് ശ്രേണി 5 ~ 24 വി, ആർഎസ് 232 സീരിയൽ പോർട്ട് സ്വീകരിക്കുന്നു. ജിപിഎസ് മൊഡ്യൂൾ output ട്ട്പുട്ട് പൊസിഷനിംഗ് ഡാറ്റ പ്രോട്ടോക്കോൾ എൻഎംഇഎ -0183 പ്രോട്ടോക്കോൾ ഉപയോഗിക്കുന്നു, കൂടാതെ നിയന്ത്രണ പ്രോട്ടോക്കോൾ യുബിഎക്സ് പ്രോട്ടോക്കോൾ ഉപയോഗിക്കുന്നു. ജിപിഎസ് പൊസിഷനിംഗ് മൊഡ്യൂളും പ്രധാന കണ്ട്രോളർ മൊഡ്യൂളും യുബിഎക്സ് പ്രോട്ടോക്കോൾ അനുസരിച്ച് പൊസിഷനിംഗ് മൊഡ്യൂളിന്റെ സീരിയൽ പോർട്ട് ബ ud ഡ് നിരക്ക് ക്രമീകരിക്കുകയും സീരിയൽ ബസ് വഴി ആശയവിനിമയം നടത്തുകയും ചെയ്യുന്നു.
പവർ-ഓഫ് നിയന്ത്രണ മൊഡ്യൂളിന്റെ കാമ്പ് ഒരു റിലേ ആണ്, ഇത് നിയന്ത്രിക്കുന്ന ഒരു സ്വിച്ചിന് തുല്യമാണ്
കാർ ഇന്ധന വിതരണവും കാർ വൈദ്യുതി വിതരണവും മാറുന്നതിനുള്ള സിസ്റ്റം, അതായത് ആരംഭം, ഇന്ധന വിതരണം,
വൈദ്യുതി വിതരണവും മറ്റ് പ്രവർത്തനങ്ങളും. പവർ-ഓഫ് നിയന്ത്രണ മൊഡ്യൂളിന്റെ സർക്യൂട്ട് ഡയഗ്രം ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നു.
സെൻസർ മൊഡ്യൂളുകൾ, കമ്മ്യൂണിക്കേഷൻ മൊഡ്യൂളുകൾ, പൊസിഷനിംഗ് മൊഡ്യൂളുകൾ, പവർ-ഓഫ് നിയന്ത്രണ മൊഡ്യൂളുകൾ എന്നിവയുൾപ്പെടെ ഒരു ഘടനാപരമായ രൂപകൽപ്പനയിലാണ് സോഫ്റ്റ്വെയർ എഴുതിയിരിക്കുന്നത്. രൂപകൽപ്പന പ്രക്രിയ ഇപ്രകാരമാണ്: ആദ്യം, ഓരോ മൊഡ്യൂളും സമാരംഭിക്കുക, തുടർന്ന് ക്രമീകരണം പൂർത്തിയായ ശേഷം അടുത്ത ഘട്ടം നടപ്പിലാക്കുക; സെൻസർ മൊഡ്യൂൾ ശേഖരിച്ച ഡാറ്റ സാമ്പിൾ ചെയ്ത് വിശകലനം ചെയ്യുന്നു. സാമ്പിൾ സാധാരണമാണെങ്കിൽ, അടുത്ത പ്രവർത്തനത്തിലേക്ക് പോകുക; വീണ്ടും, ജിപിഎസ് പൊസിഷനിംഗ് മൊഡ്യൂളിനെയും ജിഎസ്എം നെറ്റ്വർക്ക് മൊഡ്യൂളിനെയും വിളിക്കുക, അടുത്ത പ്രവർത്തനത്തിലേക്ക് പോകാൻ സാധാരണക്കാരനെ വിളിക്കുക; അവസാനമായി, പവർ-ഓഫ് നിയന്ത്രണ മൊഡ്യൂളിനെ വിളിക്കുക, തുടരാൻ സാധാരണക്കാരനെ വിളിക്കുക അടുത്ത ഘട്ടം.
എല്ലാ മൊഡ്യൂളുകളും വിളിച്ചതിന് ശേഷം, അസാധാരണമായ ഒരു സാഹചര്യം കണ്ടെത്തി റിപ്പോർട്ടുചെയ്യുന്നതുവരെ മുഴുവൻ സിസ്റ്റത്തിന്റെയും പ്രധാന പ്രോഗ്രാം സിസ്റ്റം മുകളിലുള്ള ഘട്ടങ്ങൾക്കനുസരിച്ച് പരിശോധന നടത്തുന്നു. അവയിൽ, ജിഎസ്എം / ജിപിആർഎസ് നെറ്റ്വർക്ക്, ജിപിഎസ്, റിലേ നിയന്ത്രണം എന്നിവ യഥാക്രമം ഉടമയുടെ നിർദ്ദേശപ്രകാരം വിളിക്കുന്നു.
ഉപസംഹാരം
റോഡ്റാഗൺ STM32F103 സിംഗിൾ-ചിപ്പ് മൈക്രോകമ്പ്യൂട്ടർ ഉപയോഗിക്കുന്നു, കൂടാതെ കാർ-മോഷണ വിരുദ്ധ പ്രവർത്തനം തിരിച്ചറിയുന്നതിന് ഒരു കാർ പൊസിഷനിംഗ് ആന്റി-തെഫ്റ്റ് സിസ്റ്റം രൂപകൽപ്പന ചെയ്യുന്നതിന് സെൻസറായി SW-420 സാധാരണയായി അടച്ച വൈബ്രേഷൻ മൊഡ്യൂൾ ഉപയോഗിക്കുന്നു. സിസ്റ്റം നന്നായി പരീക്ഷിച്ചുവെന്നും സമയബന്ധിതവും ഫലപ്രദവുമായ രീതിയിൽ ഉടമയ്ക്ക് കാറിന്റെ തത്സമയ നിരീക്ഷണവും നിയന്ത്രണവും ഫലപ്രദമായി മനസ്സിലാക്കാൻ കഴിയുമെന്ന് പരീക്ഷണങ്ങൾ തെളിയിച്ചിട്ടുണ്ട്. ഹാർഡ്വെയർ ലളിതമാണ്, ചെലവ് കുറവാണ്, അപ്ലിക്കേഷൻ മൂല്യം ഉയർന്നതാണ്, പ്രതീക്ഷിച്ച ഫലം കൈവരിക്കുന്നു. സമയ പരിമിതി കാരണം, വീഡിയോ മോണിറ്റർ തിരിച്ചറിയാൻ ക്യാമറ ചേർക്കുന്നത് പോലുള്ള മറ്റ് പ്രായോഗിക പ്രവർത്തനങ്ങൾ ചേർക്കാൻ കഴിഞ്ഞില്ല.
പോസ്റ്റ് സമയം: സെപ്റ്റംബർ -11-2020